You will need a Rotary Encoder and Digispark.
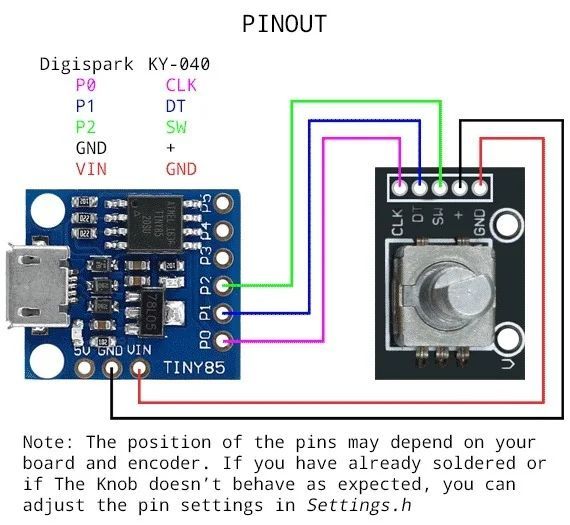
You will also need 4 female to female wires in order for it to work. There will be a picture below for reference.
After wiring, we will proceed with the coding in order for the thing to work.
I did not have a hard time understanding the codes because I am currently studying in Information Technology.
Those who have no coding background, no worries.
Code will be given below, check it out!
- #include"TrinketHidCombo.h"
- #define"PIN_ENCODER_A 0"
- #define"PIN_ENCODER_B 2"
- #define"TRINKET_PINx PINB"
- static uint8_t enc_prev_pos = 0;
- static uint8_t enc_flags = 0;
-
- void setup()
- {
- // set pins as input with internal pull-up resistors enabled
- pinMode(PIN_ENCODER_A, INPUT);
- pinMode(PIN_ENCODER_B, INPUT);
- digitalWrite(PIN_ENCODER_A, HIGH);
- digitalWrite(PIN_ENCODER_B, HIGH);
-
- TrinketHidCombo.begin(); // start the USB device engine and enumerate
-
- // get an initial reading on the encoder pins
- if (digitalRead(PIN_ENCODER_A) == LOW) {
- enc_prev_pos |= (1 << 0);
- }
- if (digitalRead(PIN_ENCODER_B) == LOW) {
- enc_prev_pos |= (1 << 1);
- }
- }
-
- void loop()
- {
- int8_t enc_action = 0; // 1 or -1 if moved, sign is direction
-
- // note: for better performance, the code will now use
- // direct port access techniques
- // http://www.arduino.cc/en/Reference/PortManipulation
- uint8_t enc_cur_pos = 0;
- // read in the encoder state first
- if (bit_is_clear(TRINKET_PINx, PIN_ENCODER_A)) {
- enc_cur_pos |= (1 << 0);
- }
- if (bit_is_clear(TRINKET_PINx, PIN_ENCODER_B)) {
- enc_cur_pos |= (1 << 1);
- }
-
- // if any rotation at all
- if (enc_cur_pos != enc_prev_pos)
- {
- if (enc_prev_pos == 0x00)
- {
- // this is the first edge
- if (enc_cur_pos == 0x01) {
- enc_flags |= (1 << 0);
- }
- else if (enc_cur_pos == 0x02) {
- enc_flags |= (1 << 1);
- }
- }
-
- if (enc_cur_pos == 0x03)
- {
- // this is when the encoder is in the middle of a "step"
- enc_flags |= (1 << 4);
-
}
- else if (enc_cur_pos == 0x00)
- {
- // this is the final edge
- if (enc_prev_pos == 0x02) {
- enc_flags |= (1 << 2);
- }
- else if (enc_prev_pos == 0x01) {
- enc_flags |= (1 << 3);
- }
-
- // check the first and last edge
- // or maybe one edge is missing, if missing then require the middle state
- // this will reject bounces and false movements
- if (bit_is_set(enc_flags, 0) && (bit_is_set(enc_flags, 2) || bit_is_set(enc_flags, 4))) {
- enc_action = 1;
- }
- else if (bit_is_set(enc_flags, 2) && (bit_is_set(enc_flags, 0) || bit_is_set(enc_flags, 4))) {
- enc_action = 1;
- }
- else if (bit_is_set(enc_flags, 1) && (bit_is_set(enc_flags, 3) || bit_is_set(enc_flags, 4))) {
- enc_action = -1;
- }
- else if (bit_is_set(enc_flags, 3) && (bit_is_set(enc_flags, 1) || bit_is_set(enc_flags, 4))) {
- enc_action = -1;
- }
-
- enc_flags = 0; // reset for next time
- }
- }
-
- enc_prev_pos = enc_cur_pos;
-
- if (enc_action > 0) {
- TrinketHidCombo.pressMultimediaKey(MMKEY_VOL_UP);
- }
- else if (enc_action < 0) {
- TrinketHidCombo.pressMultimediaKey(MMKEY_VOL_DOWN);
- }
- else {
- TrinketHidCombo.poll(); // do nothing, check if USB needs anything done
- }
- }